Division of AI Data Convergence, Hankuk University of Foreign Studies
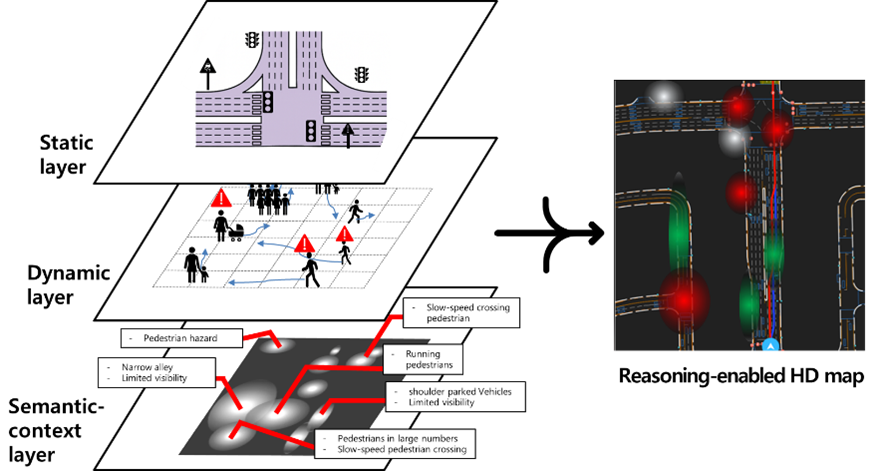
Vehicle-Oriented Intelligence with Data.
We fill the void in autonomous driving research.
4+
Journal Papers
8+
Int'l Conferences
₩2.8억
Research Funding
5
Members